前言
AR4机械臂是一个六轴机械臂,由anninrobotics开发,源代码全部开放,其底层硬件由Arduino进行开发,上层是使用ROS进行控制的。
官网网站:https://www.anninrobotics.com
实验室中一直有一个这样的一个机械手闲置,盖着布,蒙着灰。刚好假期前有一点时间,要不尝试让他动起来?于是我找老师把这个机械手搬了过来,开始使用
使用前的相关的资料
首先需要很多相关的资料,我将我下载到的文件内容后续会补充到这里
驱动安装
假如之前没有使用过CH340系列的USB转串口芯片,那么我们要安装他的驱动
https://www.wch.cn/products/CH340.html
下载下来之后,界面如下图
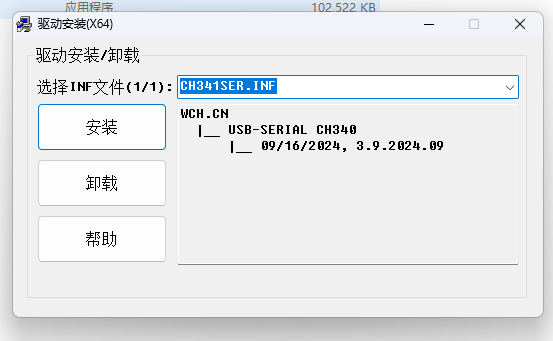
点击安装,安装完成之后插入设备,剩下的工作windows会自己完成
软件下载
前往官网下载对应的AR4控制程序(AR4 SOFTWARE)
https://www.anninrobotics.com/downloads
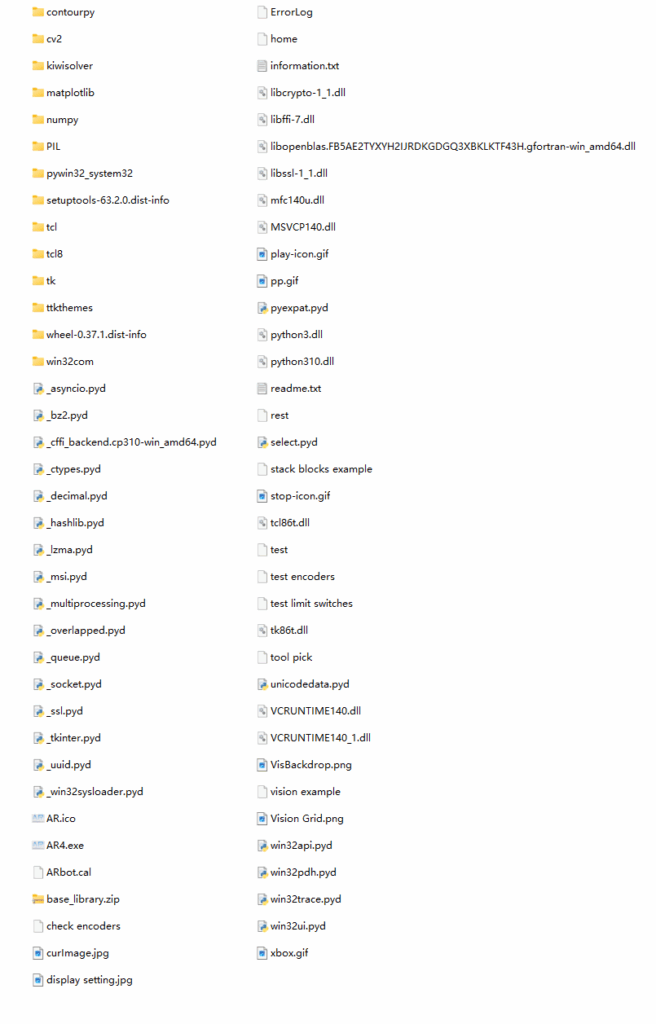
文件夹的内容应该像下面这个样子(点击AR4.exe开始运行)
运行起来界面如下:
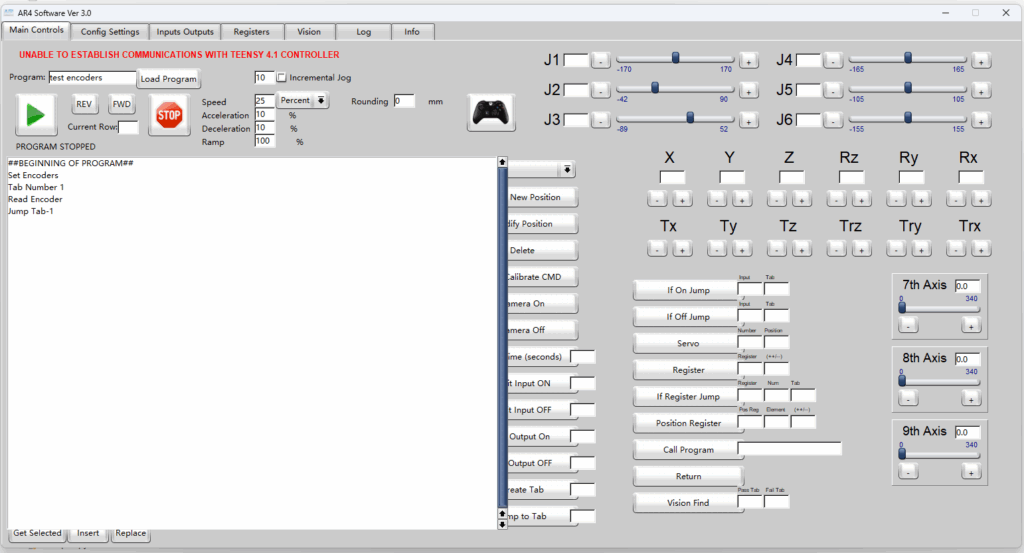
接下来就是打开串口,当我们将
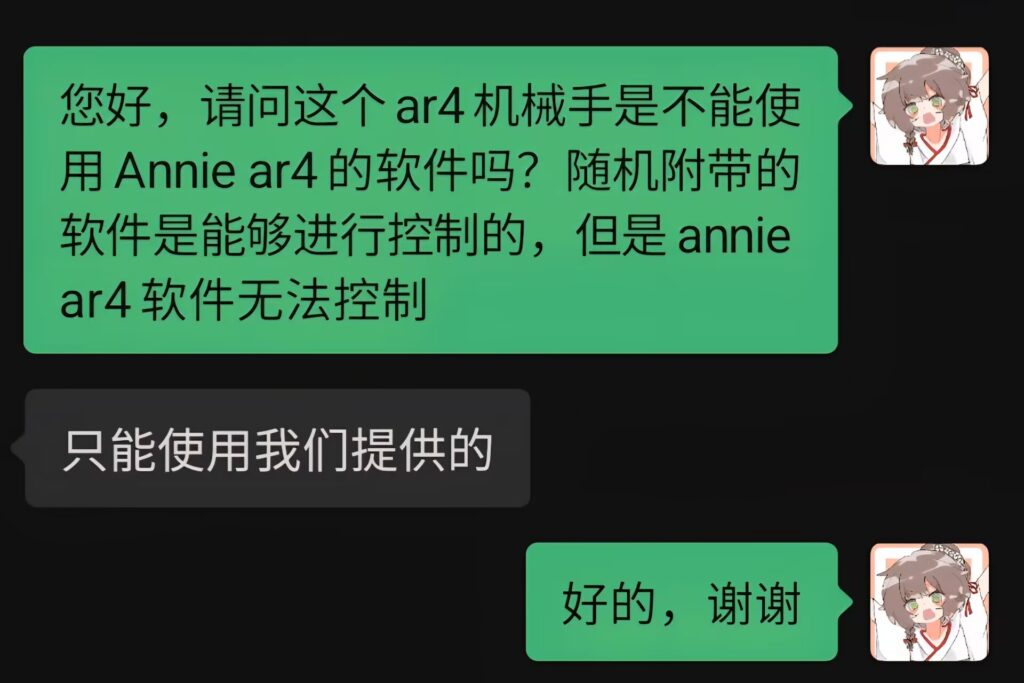
备注:这里出现了一个问题,上面用的是AR4 SOFTWARE的官网软件,但是实际上用到我在实验室的机械手上,发现每次打开串口(下一步的操作),打开的时候总是界面卡死,无法打开串口,后面我顺着信息来找,联系了卖机械手给老师的公司的客服,发现他们貌似对机械手进行了二次的封装,有些许改动,也将官方的软件给改了,所以这台实验室的机械手是无法连接官方的AR4 SOFTWARE的软件(但是实际上他们提供的软件是基于官方的1.2版本进行改造的,官方现在最新版本是3.0),当然操作上是大同小异的,底层大架构是没有变的。所以下面我的内容以随我弄到的机械臂的附件中的软件为主(操作上是一样的)
连上线,开始连接
首先我这台机械臂有两个MICRO USB的口和一个电源接口,两个接口,一个为TEENSY4.1接口,一个是ARDUINO接口(如下图)

两个接口全部插在电脑上,可以在设备管理器里的端口中看到下面的新增的设备

会出现上图中的两个串口,其中的USB串行设备就是TEENSY4.1接口,CH340接口就是ARDUINO的板子,我们记住这两个设备后面跟着的串口号
备注:如果CH340的那个设备显示黄色感叹号,可能和我碰到了下面的两个问题一样:
1:WINDOWS无法找到合适的驱动:请前往上文驱动安装的那个板块,卸载驱动然后重新安装驱动(如果没有安装则重新安装)
2:由于 Windows 无法加载这个设备所需的驱动程序,导致这个设备工作异常。 (代码 31):对象名已存在。
这个我碰到了好几次,后来查清楚了。原因如下:假设原来A口接上了1线(接的CH340),B口接上了2线,那么后面如果你将B口接上了1线,就会出现这个问题。处理方法也很简单,方案1:直接重启电脑,问题解决。方案2:重新将线插回第一次的插口对应关系。
接下来是在软件中点开第二个页签,界面如下
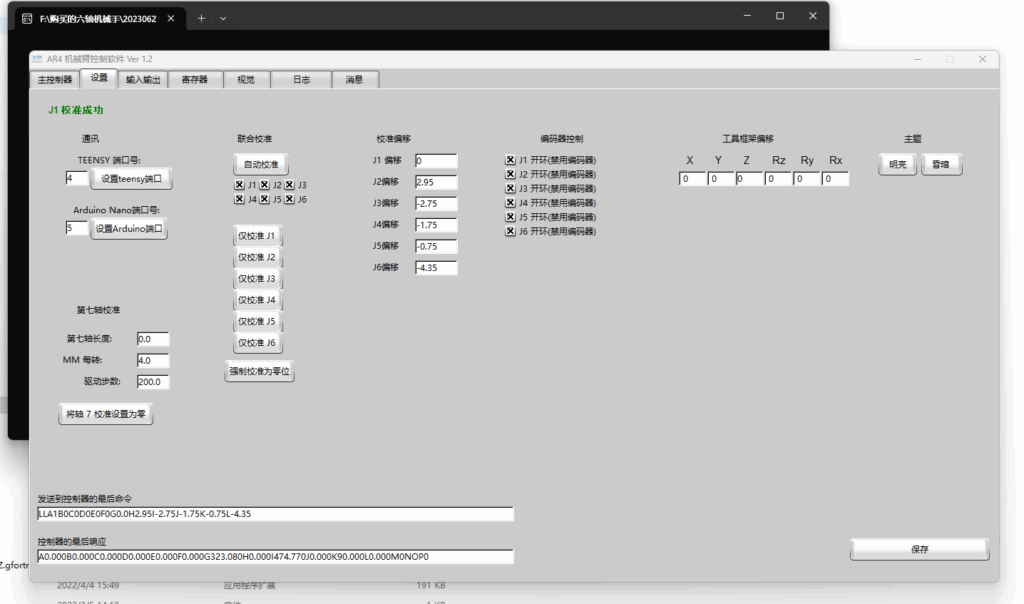
在通讯下面的Teensy端口和Arduino Nano端口号填上刚刚获取到的串口号,点击保存。
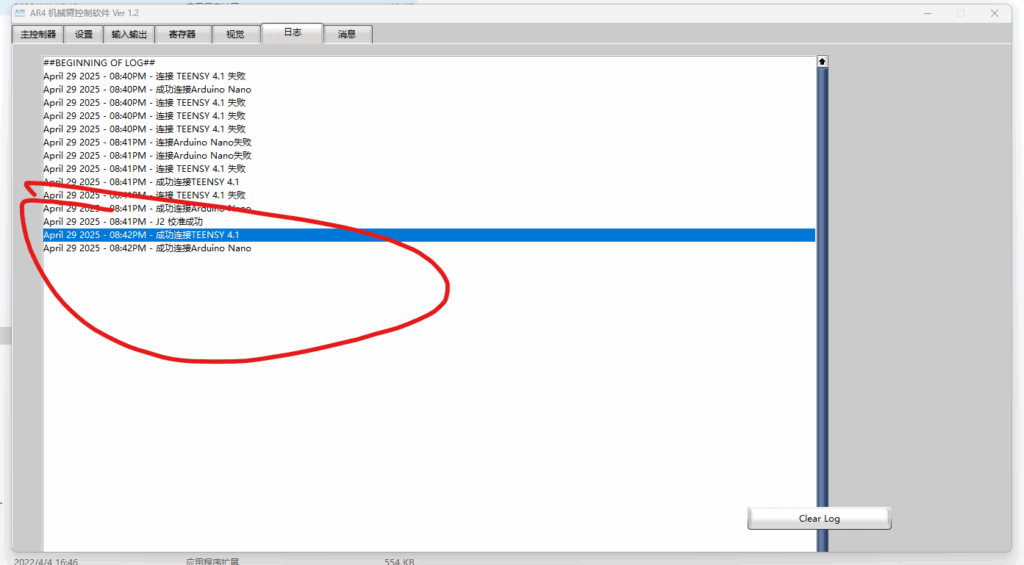
(注意,可能连接打开了但是显示错误,可以尝试重新打开软件,然后打开日志页签看看是否有成功连接了***之类的)
每个轴对应的编号以及轴归位
机械臂的对应的六个轴如图

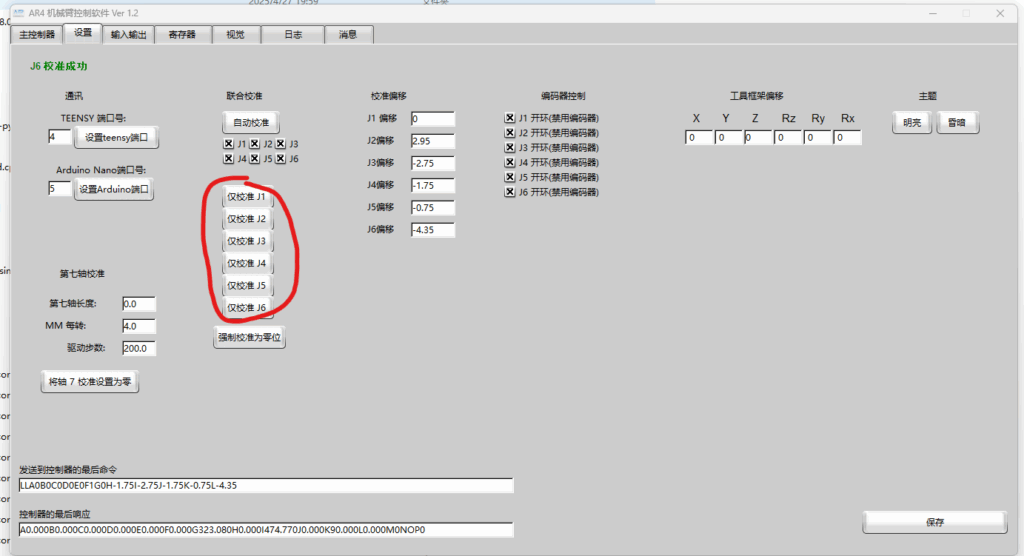
可以通过按下软件设置页签中的仅校准J1-J6按钮将机械臂归原位
手动调整机械臂的位置
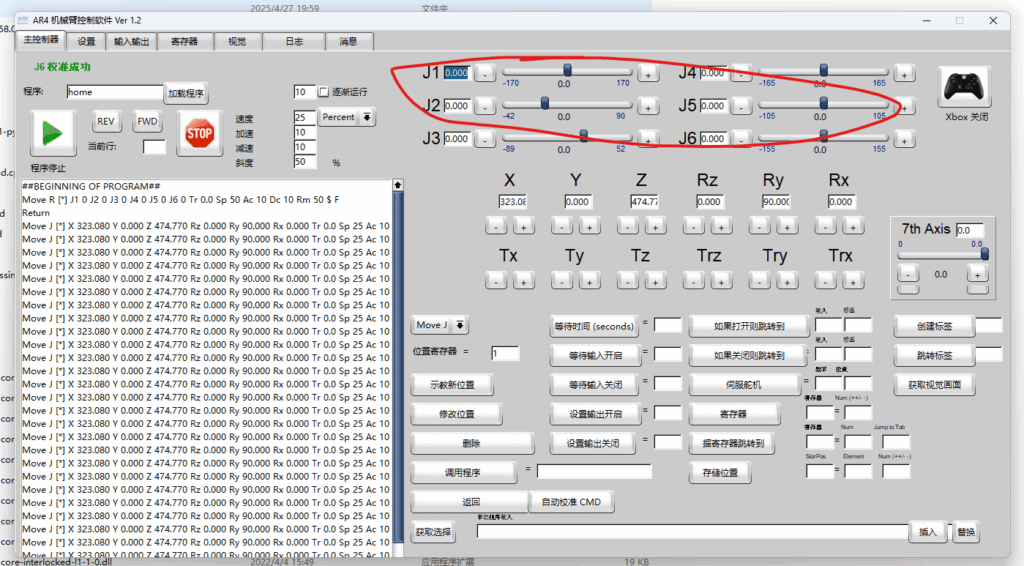
在软件主控制页(第一页)如上图中圈出的地方中可以调整六个轴的位置。